Первая робопчела совершила свой экспериментальный полет
Около пяти лет назад специалисты из Гарвардского университета впервые представили первого в мире робота-пчелу под названием RoboBee, который, по мере совершенствования технологий, смог благополучно пройти уже несколько модернизаций, научившись планировать, садиться на листья деревьев и даже плавать. Снабдив устройство механизмом с мягкими актуаторами, RoboBee приобрело способность и к самостоятельным полетам при помощи искусственных мышц.
Робот, который умеет летать
Как сообщает портал news.harvard.edu, Robobee — первый в мире микроробот, способный совершать управляемые полеты. Оснащенный специальным материалом, играющим подобие мягких мышц, робот практически не получает существенных повреждений при столкновении со стенами или случайном падении. Вместе с тем, возможность существенного прорыва в робототехнике при использовании мягких актуаторов долгое время была обсуждаема специалистами в качестве довольно сомнительной идеи из-за некоторых трудностей, возникающих при управлении микроаппаратом.
Для того, чтобы повысить шансы на успех при эксплуатации аппарата, исследователи из США модернизировали технологию производства мягкого актуатора, приводимого в действие при помощи обычной электрической энергии. Значительно улучшив устройство при помощи использования диэлектрических эластомеров, которые представляют собой особые мягкие материалы с хорошими изоляционными свойствами, исследователи из Гарварда добились от Robobee эффективной работы на частоте 500 Герц, что сопоставимо с необходимыми параметрами работы для жестких актуаторов.

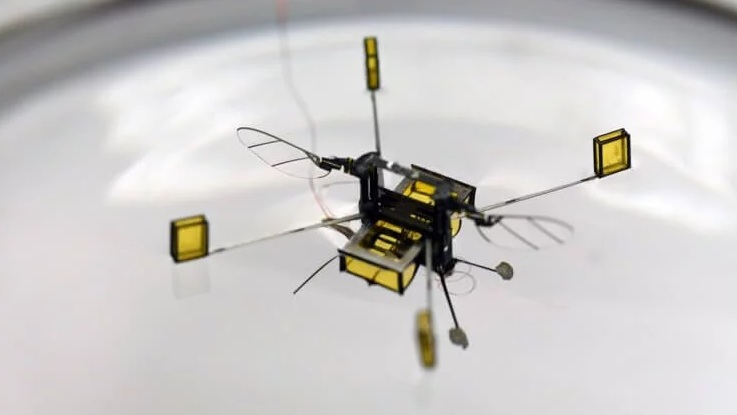
Одной из проблем, которая возникает при создании роботизированных устройств нового поколения, считается сильная хрупкость и неустойчивость микроробота при эксплуатации. Для того, чтобы обеспечить эффективное использование роботом мягких искусственных мышц, исследователи из Гарварда решили использовать легковесный каркас, обеспечивающий, ко всему прочему, и возможность относительно легко взлетать в воздух. Протестированная модель с двумя крыльями показала свою способность успешно преодолевать препятствия и продолжать полет даже после столкновения с аналогичным аппаратом. Такая способность может помочь исследователям улучшить технологию полетов и научить миниатюрных роботов проникать даже в самое ограниченное пространство, делая их незаменимыми помощниками при поисково-спасательных операциях.